Vita Liberu é uma empresa de arte electrónica de robots de companhia e segurança vivos. Criada a 1 de Outubro de 2015, e está com a fase de desenvolvimento terminada.
Disposição do primeiro produto prevista para 2024-25...apesar do software ter sido pronto de Agosto 2004 a Outubro de 2024.
Visão: Não gostaríamos, todos nós, de ter um robot que nos fizesse companhia, conversasse, ajudasse nas tarefas, jogasse, etc.?! E não gostaríamos de o poder educar à nossa maneira, como se de um filho se tratasse, adquirindo o nosso maneirismo? Melhor ainda, não seria óptimo se o pudéssemos partilhar com os outros na educação que lhe damos? De maneira a, pudermos trocar capacidades “robóticas”? como por exemplo: adquirir um ficheiro dum outro robot para instalar no nosso e este ficar com a capacidade de lavar a loiça?! Ou melhor ainda: prestar ajuda mecânica, ao carro empanado?!
Pois, “animem-se”… Estamos mais perto do que pensávamos.
Para isso acontecer o robot necessita de estar “vivo” ou imitar a vida se preferirem, sem entrar em debates sobre o que é um ser vivo ou um ser inanimado. Precisa-se, por isso, de um “corpo” mecânico e de um “cérebro” eléctrico para dar vida ao corpo. O cérebro, vai ser uma simulação do cérebro humano, já que é neste que cada um de nós pode fazer introspecções e tirar conclusões. Adaptamos isso às limitações do corpo do robot, aos seus movimentos ainda limitados, sensores e outras capacidades ainda que reduzidas.
Propomos apresentar e disponibilizar 3 produtos Vita, composta por um sofware ou cérebro Liberu e um corpo Formica. Este último contém um firmeware escrito em C e um hardware de tecnologia Arduino. O Liberu é escrito em Java.
A utilidade destes produtos baseia-se na capacidade de o dono do robot de companhia poder ser avisado por este, de algo fora do normal na vida do robot. Enviando, assim, na ausência do dono, e/ou a pedido, uma mensagem para o dono de que algo está diferente. Ajuda-nos na segurança doméstica.
E o melhor do programa Liberu, é que, basta mudar o número de Passos no programa, ter sentidos mais apurados e um corpo mais ágil, para termos um Ser com, diguê-mos... cerca de 70% das capacidades de um cérebro humano. Falta acrescentar um pescoço e atenção para criar uma Imaginação e subir mais 10% da capacidade, aproximadamente!!! (Prevemos nós)
Veja o video de 5 minutos do nascimento do meu segundo Liberu-NXT Lego num Intel Core i7 e 10.000 passos por geração. O que dá para uma janela temporal de cerca de 4 horas...
Veja uma utilidade do programa Liberu-NXT para detecção de uma experiência ainda não vivida como o som muito alto.
Num video de 3 minutos...
Anagrama!!!
Veja a versão Arduino para o tempo de vida, dos passos entre o número 71 e o 98 (os primeiros 30 são aleatórios - Útero)...
Aqui vai a versão FINAL do Liberu para um computador com Java instalado (sem necessidade de bibliotecas externas por instalar) de um labirinto de 8 por 8 com 5.000 passos - Formica virtual ou C. Elegans.
Com as classes Liberu, World, Interface, Mind, Remember, Emotions, Sleep, Cerebellum, Act, Brain, Cortex, Neuron, Signal
Aqui vai a última versão final e testada, COMPLETA, do programa "Liberu" para um computador com Java instalado de um labirinto de 8 por 8 com 5000 passos - Formica virtual.
Ou também para funcionar num robot Arduino por exemplo via cabo série USB ou Bluethoot e tambêm com o robô NXT MindStorm da Lego via Bluethoot.
dat e as classes Liberu, World, Interface, Mind, Remember, Emotions, Sleep, Cerebellum, Act, Brain, Cortex, Neuron, Signal
O resultado desta última versão num robot Arduino... veja o filme aqui...
Ver no YouTube uma Apresentaçâo de mim e uma Demonstração do programa Liberu em 26 Jun 2023.
Ver também 4 videos de apresentação no dia 1 Julho 2023... Video1, Video2, Video3, Video4
Veja aqui um vídeo dum robot de tecnologia Arduino com 5 minutos de vida a orientar-se para a luz atrás da câmara... sózinho!!!
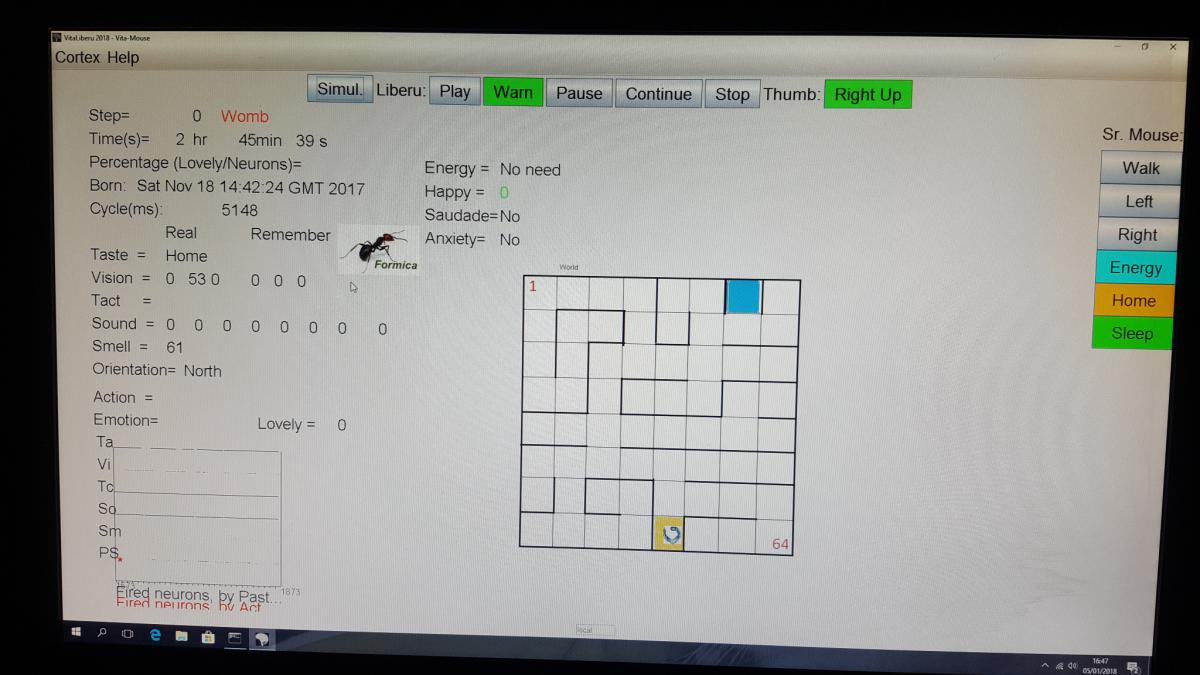
Cortex - Para novo Robô; para abrir ou guardar Cortex do Robô e para SAIR
Help - Para referência e ajuda
Simul, - Comuta entre Simulação no ecrãn do Robô, de um Robô de tecnologia Arduino por USB ou Bluetooth e um robô da Lego NXT MindStorm
Liberu - Nome do Programa
Play - Inicia o andamento do Robô
Warn - Quando activo, avisa que sentido detectou algo novo para o Robô
Pause - Pára o Robô
Continue - Repõe o Robô a andar
Stop - Pára o Robô para se poder guardar ou substituir o Cortex de outro Robô
Thumb - Quando se cruzam as mãos, qual o dedo Polegar que está por cima (Esquerdo, Direito)?
Right Up - Troca de Polegar de cima, entre Esquerdo (Emotivo) e Direito (Racional)
Sr. Mouse - Comandos dados ao Robô
Walk - Força um passo de andar para a frente
Left - Força um passo para virar à esquerda
Right - Força um passo para virar à direita
Energy - Dá prazer ao Robô
Home - Para treinar ou reproduzir um treino (normalmente para vir para casa - quadrado Laranja ou Verde atualmente)
Sleep - Pára o Robô e põe a zero o Happy ou a felicidade (antigo - em desuso)
Step - Contabiliza os passos dados pelo Robô
Womb - Aparece quado o Robô está na fase inicial (30 passos) de movimentos Aleatórios. Aqui o Robô deve executar pelo menos uma vez cada uma das 5 ações, porque se não executar uma ação nesta fase perde o poder de a vir executar no futuro
Time(s) - Tempo de vida do Robô
Percentage (Lovely/Neurons) - Percentagem de neurónios que dispararam em relação à totalidade de neurónios (#sentidos x 10.000passos)
Born - Data de nascimento do Robô
Cycle(ms) - Tempo entre passos do Robô em milisegundos
Imagem Formica - Logótipo
Taste, Vision, Tact, Sound, Smell - Sentidos do Robô
Orientation - Meramente informativo
Remember - Os sentidos da memória recordada pelo Robô
Action - Os movimentos que o Robô vai tendo (Eat, Drink, Walk, Left, Right) de cores (Vermelho-Aleatório, Verde-Comando ou curiosidade, Preto-Normal, Azul-Saudade, Laranja-Ansioso)
Emotion - As emoções que o Robô vai tendo (Dor, New, Sad, Happy, Afraid)
Lovely - Número de neurónios que dispararam
Ta, Vi, Tc, So, Sm, PS - Gráfico dos últimos neurónios que dispararam por Sentidos (Ta - Taste, Vi - Vision, Tc - Tact, So - Sound, Sm - Smell, PS - Proprioceptivo ou interno)
Gráfico - A linha do X representa o Tempo e a linha do Y estão os sentidos. Representa os neurónios que dispararam por semelhança
Asterisco vermelho - Representa qual a acção é que o Robô executou
Cruz Vermelha - Indica o tempo na memória do passado em que foi executada a ação do Robô
Energy - Se tem a bateria do Robô com pouca carga, avisa
Happy - Nível de felicidade (número positivo) e Tristeza (número negativo)
Saudade - Se o Robô sente vontade de voltar para trás (anda mais devagar)
Anxiety - Se o Robô sente vontade de seguir um caminho (anda mais depressa)
Homeostase (não visível na figura) - Média por neurónio, da totalidade de felicidade/tristeza dos neurónios usados
Input local - Para introduzir um número entre 1 e 64 para posicionar o Robô nessa casa do tabuleiro
World - Mundo do Robô
Quadrado Azul - Energia
Quadrado Laranja - Home
C. Elegans - Robô
Fazendo uma analogia entre um Cérebro e um Carro posso dizer (temos 4 partes):
1 - Tendo uma carroçaria-corpo, descobri em 2004 as rodas-difusão (lembrarmo-nos de tudo). Terminei de implementar em 2007.
2 - Em 2008 descobri o motor-dinâmica (pensarmos e agirmos). Terminei em 2012. Versão SimLiberu
3 - Em 2015 descobri o painel de comandos-emoções, o travão-dor e o acelerador-sono assim como o orientador GPS-prazer (emoções e prazer). Terminei em 2018. Versão Liberu
4 - Em 2017 descobri que me faltava implementar o volante-Atenção ou pescoço do corpo - a Atençao e Planificação, que foi descoberta e concluida em 2023. Versão Liberu
... e ficamos com um completo carro-cérebro ou seja um ser vivo!!!
Cumprimentos
Conselho: Comece por ler na pagina Liberu o projecto de livro chamado Sistemas Livres!!!
O que eu espero do mundo:
Da IBM ou Intel - que programe em hardware, o programa Liberu com saídas e entradas para o corpo do robô.
Da Google - que desenvolva uma procura de bens, serviços e pessoas, por próximidade ao utilizador (que eu tenho umas noções)
Da Honda - que desenvolva um corpo do robô com feedback dos movimentos e cordas vocais de acordo como um equalizador e sons humanos (que eu não faço muita ideia de como se faz)
Das Pessoas do mundo... que se unam emotivos com racionais (surpreendem-se, nirvana) e não emotivos com emotivos (identificam-se, guerra de lideres) e racionais com racionais (identificam-se, silêncio entre chefes). Ver Capítulo 21 do livro mencionado em cima - "Sistemas Livres".
Conclusões tiradas até agora no comportamento dos robôs:
Um robô com o polegar esquerdo por cima (Thumb: Left Up) é mais energético que com o polegar direito em cima (Thumb: Right Up).
O robô tende a se estabilizar ou procurar o lugar ou rotina que lhe dá mais prazer (Energy).
O robô pode teimar em não ir para casa (Home) mesmo depois de ensinado (Walk; Left; Right)... desvia-se para melhores lugares ou rotinas.
Um robô aprende rápidamente a não chocar contra as paredes... exepto em casos de Ansiadade (Anxiety) ou Saudade.
Conclui, também, que no caso do labirinto, em que se trata (à parte do sentido do som) de um sistema de ambiente teoricamente nivelado. Uma vez que os resultados de prazer/dor em todo o labirinto se mantém igual. E dos 2.949 passos que deu (4h 51min 21s) a homeostase se mantém com variações ligeiras, comparativamente, e mantêm-se práticamente constante (no passo 72 a homeostase era de -303, e no passo 2949 é de -276)... o que se pode dizer que o robô não necessita de “energia” extra para raciocinar! Mas é como se não se vivesse e aproveitar-se a vida...
Já no caso do robô Arduino, no mundo real, com 416 passos vividos (43 minutos) a homeostase varia significativamente ao longo do tempo tanto para o prazer, quer para a dor. Não me admira, por isso, que os seres vivos necessitarem por vezes de aditivos químicos! E a tendência é para ir diminuindo o prazer é aumentar a dor (no passo 96 tinha de homeostase era de 56, no passo 416 tinha -524). Não me surpreende também as adições e vícios aos químico, nem me admira os suicidios... por tão baixa dopamina, que poderá ser o que contabiliza a homeostase...... “viver vai doendo”!
Talvez se explique isso por, o corpo necessitar de mais energia do que a mente?!
Veja, o vídeo (de 3 minutos e 28 segundos) do resultado, num, robò da Lego NXT MindStorm (habituado, desde nascença, ao escuro)...
Mais um vídieo onde o robô descobre a melhor luz (quarto) em vez de seguir alguma luz....
Desafio Mundial, para puxarem pela cabeça...
Se quiserem, podem decifrar o seguinte encriptador, o próprio encriptado CriptoCodificado.txt, que se encontra em línguagem Java!!! Contactem-me, se conseguirem! Boa sorte...
Aqui vai o programa encriptador em Java Cripto, versão 2023, que (des)encripta texto (tipo .txt), até 60 000 caracteres, perante um número de uma fórmula e um número de uma senha à escolha.
Tentem educar o robô para voltar para casa (quando se tecla Home) com o menor número de ordens (Walk, Left, Right) e quando ele não for para casa (tecla Home) que descubra também, com poucos comandos, a casa azul (Energy-prazer) com poucos marcadores com a tecla Energy (um biscoito-prazer).
Felicidades!
Paulo Roque Silva